 Bonne visite !! AMINE EL KHARROUBI
Bonne visite !! AMINE EL KHARROUBI
Matériel
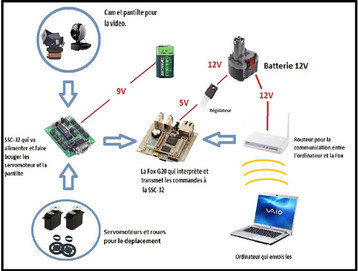
Schéma général
Description du Matériel

La carte FOX est un system embarqué à bas cout (60mA). On peut installer dessus un system d’exploitation linux embarquée, et donc on peut l’utiliser comme un micro ordinateur. Cette carte alors permettra le contrôle du robot, car c’est avec elle que notre ordinateur sera connecté. Et elle est dotée de :
- · Un processeur ARM9 400Mhz.
- · 64Mo de mémoire RAM
- · Deux ports USB 2.0 (12 Mbits par seconde)
- · Un port Ethernet 10/100
- · Un port mini USB (12 Mbits par seconde)
- · Un port série de débogage (3,3 V)
- · Un port série pour 4DSystems écrans OLED
- · Lecteur de carte micro SD (jusqu'à 8 Go)
- · Entrée d'alimentation 5VDC
- · Horloge en temps réel avec le lithium à bord de la batterie de sauvegarde
- · lignes GPIO (3.3v)

La carte SSC-32 est un contrôleur de servomoteur, elle permet de gérer jusqu’à 32 moteurs numéroter de 0 a 31, programmable en série par commandes ASCII, et elle est très utilisée dans la robotique. Elle est dotée :
- · D’un port série pour la liaison avec d’autres cartes électroniques.
- · De 32 sorties PWM, une pour chacun des servomoteurs qu’elle peut contrôler.

N’importe quel routeur wifi peut faire affaire, son rôle est simplement de créer un réseau wifi local pour la communication entre le robot et l’ordinateur. Alors on a pris un EDIMAX AR-7084GA.

|
|
|
|
|
|
Un servomoteur est un système motorisé capable d'atteindre des positions prédéterminées, puis de les maintenir ou à l’inverse de tourner de façon continue dans un sens donné en réalisant une simple modification sur ce dernier.

Ce support est équipé de 2 servomoteurs, et permet de monter une caméra ou un autre appareil et de la faire bouger sur 2 axes, horizontalement et verticalement.

Une caméra webcam est nécessaire pour la vision de l’entourage du robot aussi pour la capture d’image. On a choisi la Logitech C250.
- · Capteur VGA amélioré (640 x 480 pixels)
- · Capture vidéo: jusqu'à 800 x 600 pixels
- · Photos: jusqu’à 1,3 méga pixel (1280 x 1024)
- · Vidéo jusqu’à 30 images par seconde

Ce convertisseur convertie les données qui entre de son coté USB et les fait sortir de l’autre coté COM.

C’est une batterie d’une visseuse, elle dure vers les 4 heure, elle va alimenter la carte fox et le routeur, elle génère 12V de tension.

Un régulateur de tension, est un composant électronique qui maintient, dans certaines limites, à sa sortie une tension constante, indépendamment, de la charge et de la tension d'entrée.
Dans notre cas, il maintient 5V à sa sortie.